Self-driving vehicles and infrastructure
Experiments with self-driving cars started in the 1920s, and promising trials took place in the 1950s. But the first self-sufficient and genuinely autonomous vehicles did not appear until the 1980s, and by 1987, most of the world’s significant manufacturers of automobiles were researching and developing autonomous vehicles.
In 2013, Vislab, a joint venture of the University of Parma, Oxford University, and Google, demonstrated BRAiVE, a car that moved autonomously on a mixed traffic route open to public traffic. Over the decades, the technology behind the development of self-driving vehicles has advanced dramatically. Computer chips have become smaller and faster, camera technology has become more sensitive, and digital processing can interact with computer mapping and GPS. In addition, laser sensors can detect speed and nearby objects.
Critical considerations
While computers and sensors can safely maneuver self-driving vehicles through known environments, the unknown obstacles are difficult to manage. And the physical infrastructure to support self-driving cars is severely lagging.
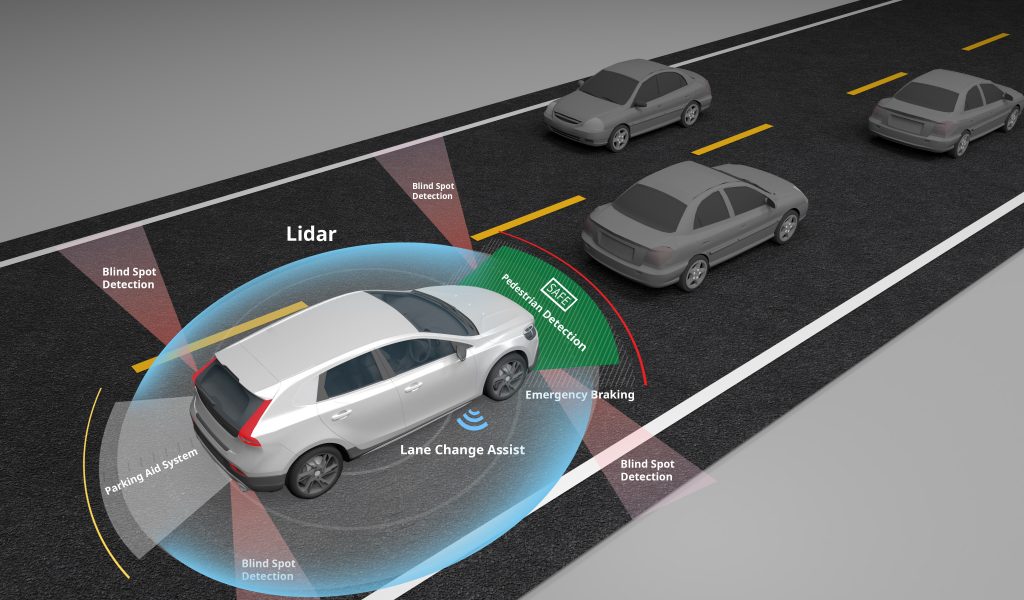
For autonomous vehicles, cameras provide the eyes to detect the lane lines and keep them headed in the right direction. Additionally, laser sensors mounted on the front, rear, and sides detect the speed and distance of other vehicles on the road.
As good as the cameras are, they still face difficulties. The number one problem is highway design, or to be exact, the lack of maintenance. The markings that define the traffic lanes have often faded; or are redirected during construction or roadway expansion, resulting in multiple lane markings. In addition, during the early morning and evening hours, when the sun is at a low angle, the surface glare can hide markings from the cameras. Snow, fog, and ice conditions also pose a big problem for both cameras and laser sensors.
The terrain is also an obstacle to the guidance system. Cameras and lasers look forward ten or more feet to build a model of the road ahead. However, steep hills and sharp curves limit the ability of the sensors to see what is in front
of them.
Safety is paramount
To facilitate safe transportation upgrades to roadway infrastructure will require a combination of technology and physical changes:
1. It will require installing radio transmitters to traffic lights to send a digital signal to onboard computers.
2. Higher-capacity mobile and wireless data networks will need to be placed along roadways to handle vehicle-to-vehicle and vehicle-to-infrastructure communications and provide real-time data on weather, traffic, and other conditions.
Safety is primarily the responsibility of the driver, who must continuously observe, analyze, decide, and act—a great deal of processing and decision making, to be automated. For example, one of the most challenging obstacles is four-way stop intersections and roundabouts requiring drivers to yield to right-of-way traffic. Furthermore, self-driving systems are not good at detecting and interpreting which vehicle arrived first or human cues, such as gestures and eye contact, that facilitate coordination between drivers.
How will it all play out?
The design and installation of the needed infrastructure technology are likely to be decades behind the development of private vehicles themselves. Moreover, earlier this year, Uber and Lyft divested from the technology might be tied to the reality that self-driving cars are not around the corner. So, in the meantime, there is talk about developing dedicated lanes or zones for self-driving vehicles—both to give them a more structured environment as the technology is refined and protect other road users from their limitations.
For the trucking industry, self-driving auto-pilots will work well on the open interstate system but will be manually driven through congested areas and on surface streets.
It is noteworthy to mention that this self-driving mode, called Grade of Automation Level 4 (GoA level 4), has been in the market for many years in Mass Transit applications. Their implementation was in 1968 on the Victoria Line in London. Monorails and People Movers, one of Innova’s specialties, reached fully automated levels without any staff on board since 1970 with the Osaka Monorail.